our rigging consists of having to follow a tutorial from
http://www.rigging101.com/ , to create a rig called the 'reverse footlock' this rig means that the whole leg can be controlled with a foot in reverse position situated underneath the foot of the actual joint, hence the term 'reverse footlock
1. to start off i downloaded the prebuilt pair of legs from the VLE, and created a joint for the hip, the knee, the ankle, the ball of the foot, and a straight edge to the toe, i begun with the left leg and would proceed to mirror the joints later, all of the joint were placed in the side orthographic view using the joint tool.
2. next i positioned the joints along the side of the leg they would go inside later, this was all checked in the perspective view to make sure the joints were anatomically accurate.
3. Next i added an IK RK solver from the hip to the ankle, or 'IK Handle', also to make it easier to select each joint, i named them accordingly, eg. 'Hip_L or Ankle_L'. the IK handle acts like a puppet string, to understand where the joints connect. i also created a NURB circle, placed it to the vertex of where the knee joint is located, and moved it out so it wasnt touching the geometry, i then selected the circle, and then the i selected the IK handle on the ankle, and created a pole vector on the NURB circle, now i have an easier way to control where the knee tilts as it moves.
4. next i added an different kind of IK handle, i placed an IK SC Solver to the ankle, ball, and toe joints. and as usual, named them 'IK Handle ball' and so on and so forth to prevent confusion later.
5. Next i went into the side orthographic view again, as it was time to create the set of joints that would form the reverse foot, i made the leg joints a layer of their own to make it easier to hide them if necessary, i created a joint from the base of the foot, and then the toe, ball, and ankle, but in reverse, i then names the joints accordingly.
6. for the next step moment i moved the reversefoot joints into place (just under the existing leg joints) i then proceeded parent the ik handles for each of the foot joints to it's reverse foot counterpart, once it was all linked together i had full control over the entire leg by simply moving the reverse foot around. i also coloured the leg joints and everything on the layer yellow for visual aid.
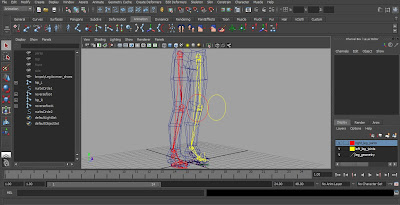
7. given that one of the legs was now complete i had to then do the same for the right, which was simply a matter of mirroring the joints, with the YX axis, and making use of the auto rename function, given all my left joints had the text '_L' for left, i told the tool to replace '_L' with '_R' for the new mirrored joints, making it simple to understand and meant i didnt have to rename them manually, i then took the new set of joints off the existing layer and gave them a layer of their own, coloured red, (i will now associate red with RIGHT) all i had to do after was do the same for the reverse foot, re-parent the new joints to the new leg, and recreate the pole vector with a new NURB circle for easier movement.

8. next i linked the joints to the leg mesh by selecting the skin menu, bind skin, then smooth bind, which linked the rig build to the legs, so i then had primitive leg movement, but it would deform once it was moved to a certain point, so what's left is to paint the weights where necessary.
9. next i created a joint for the base if i were to build a spine on top of the leg rig, i joined it to both of the hip joints so i now have a waist joint.
10. i then painted the weights onto the leg mesh, i tried to make the weights as accurate as i could on the left leg one joint at a time, making sure the deformation was correct as it moved, i then found out how to mirror the skin weights onto the other leg, made slight adjustments and now have it as accurate as a can.
11. when the weights were painted to the best of my ability, i then animated the legs to show the deformation with the click of a button as opposed to having to manually move them around, i animted each leg doing the same thing, and then the knees rotating with the legs movement to display to correct use of the pole vector.











No comments:
Post a Comment